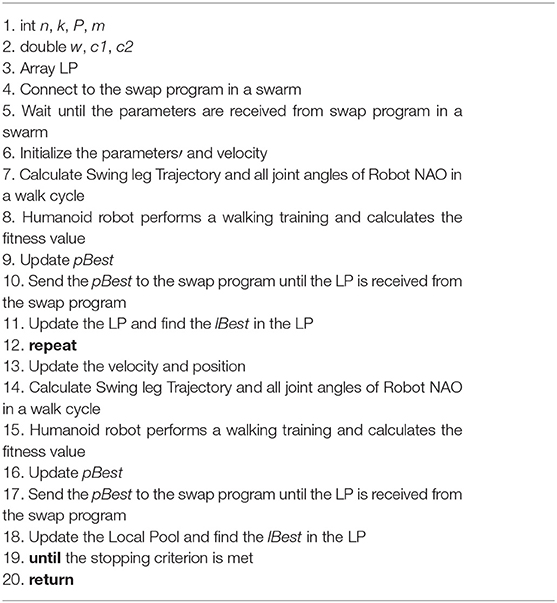
Frontiers Gait Optimization Method for Humanoid Robots Based on
4.6 (621) · $ 29.00 · In stock


PDF) Gait Optimization Method for Humanoid Robots Based on

DLR humanoid robot Justin. Download Scientific Diagram
Frontiers Gait Optimization Method for Humanoid Robots Based on
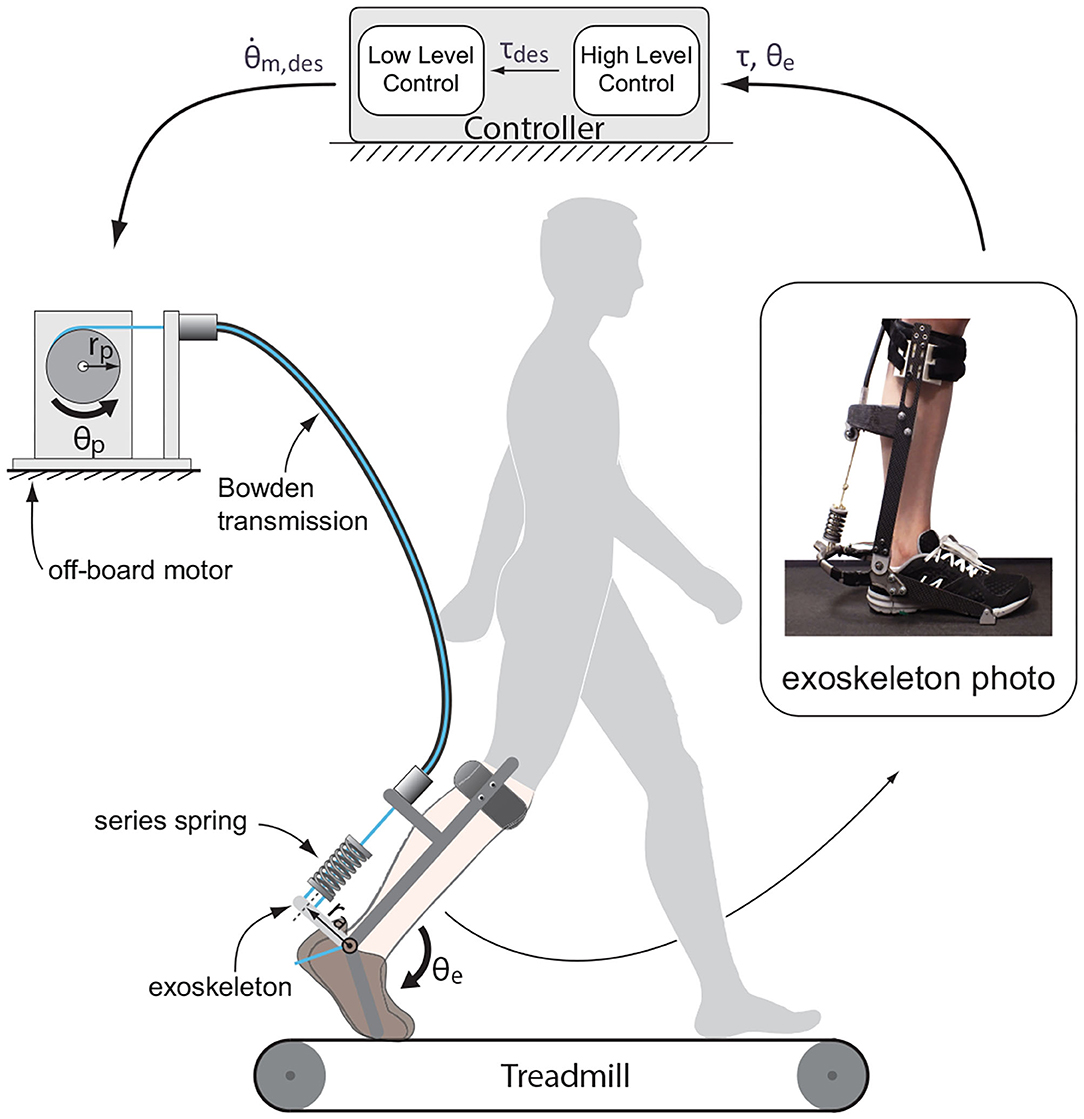
Frontiers The Iterative Learning Gain That Optimizes Real-Time
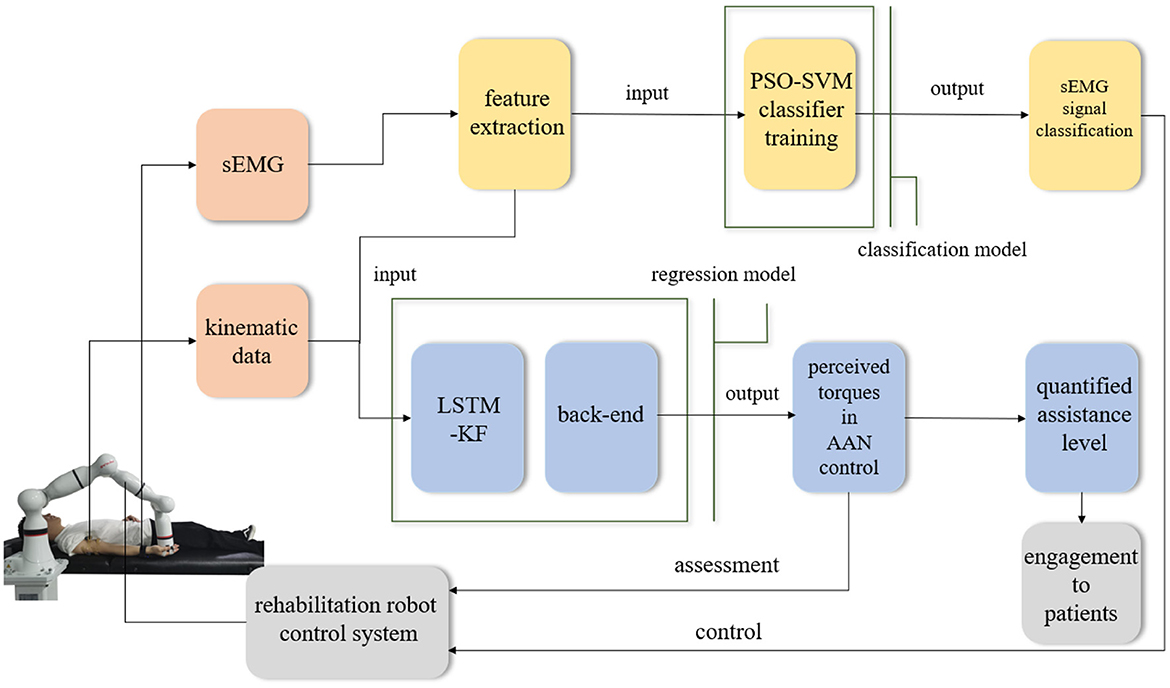
Frontiers Assistance level quantification-based human-robot

Frontiers Gait Optimization Method for Humanoid Robots Based on
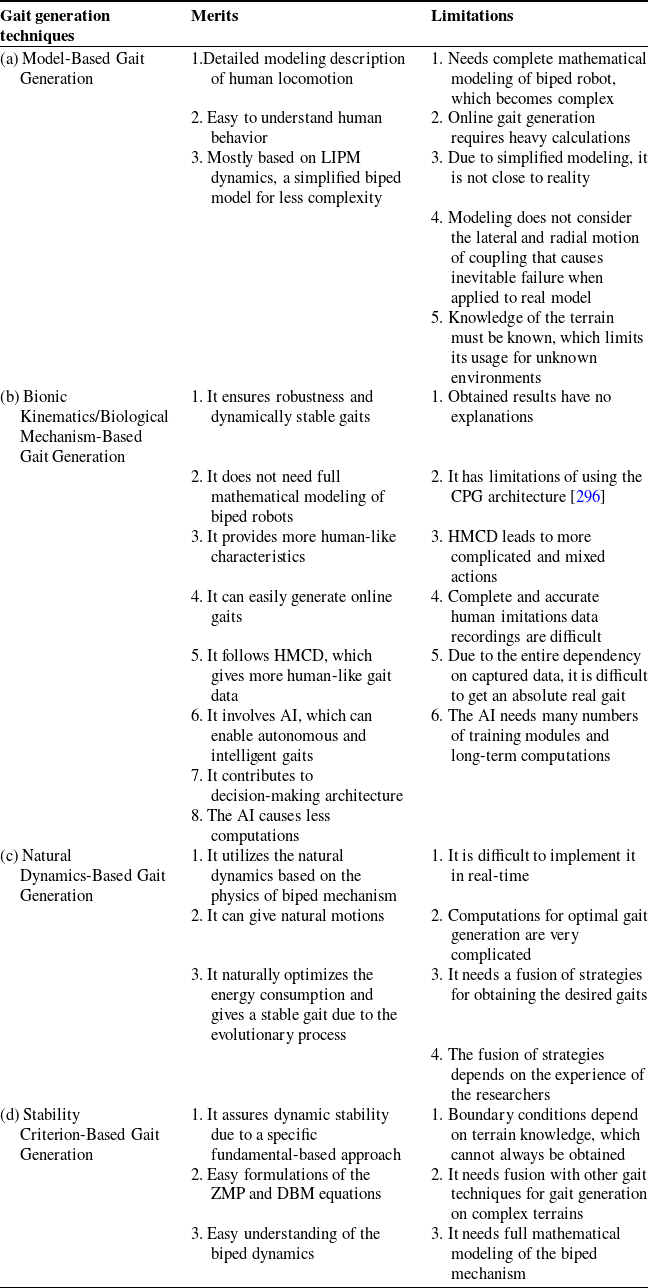
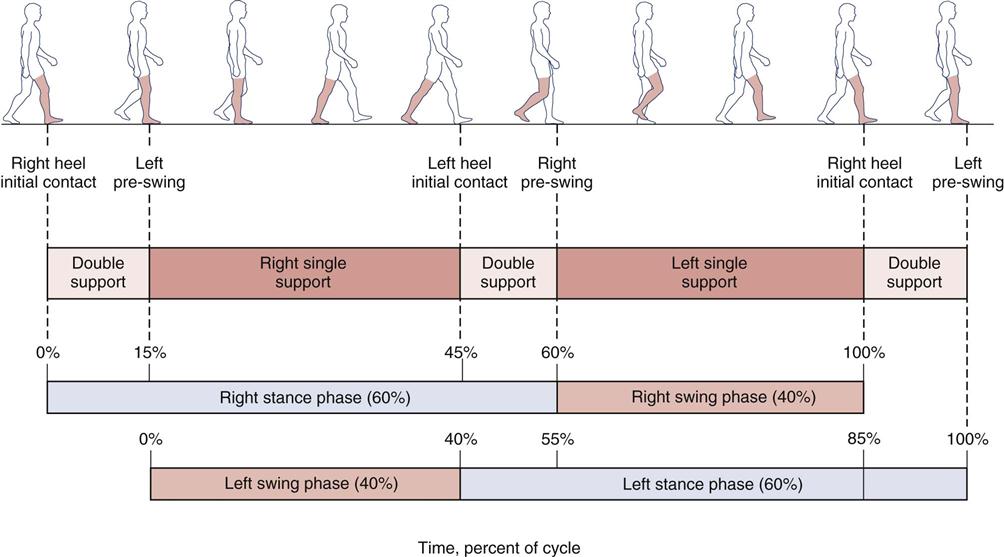
A review on gait generation of the biped robot on various terrains
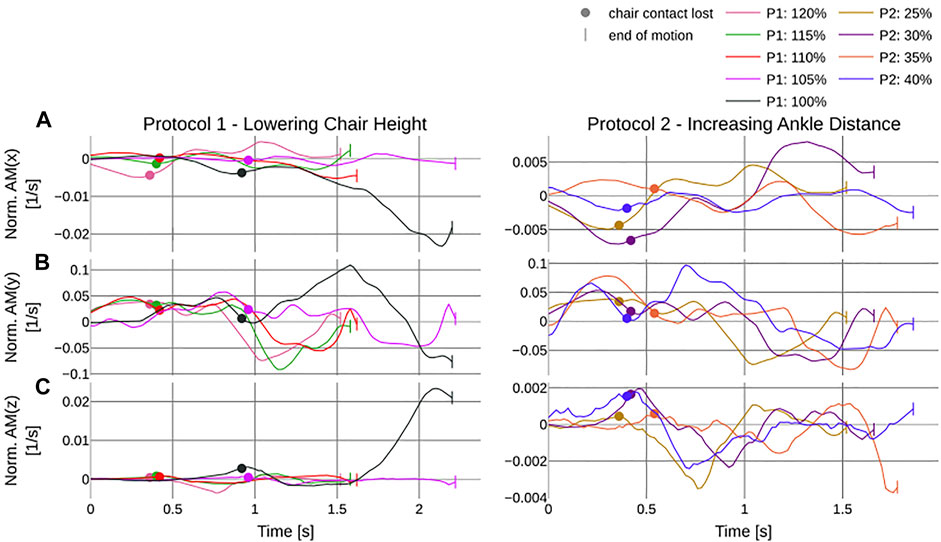
Frontiers Optimization of Dynamic Sit-to-Stand Trajectories to

Applied Sciences, Free Full-Text

Smart Gait: A Gait Optimization Framework for Hexapod Robots
You may also like





Related products



© 2018-2024, bellvei.cat, Inc. or its affiliates