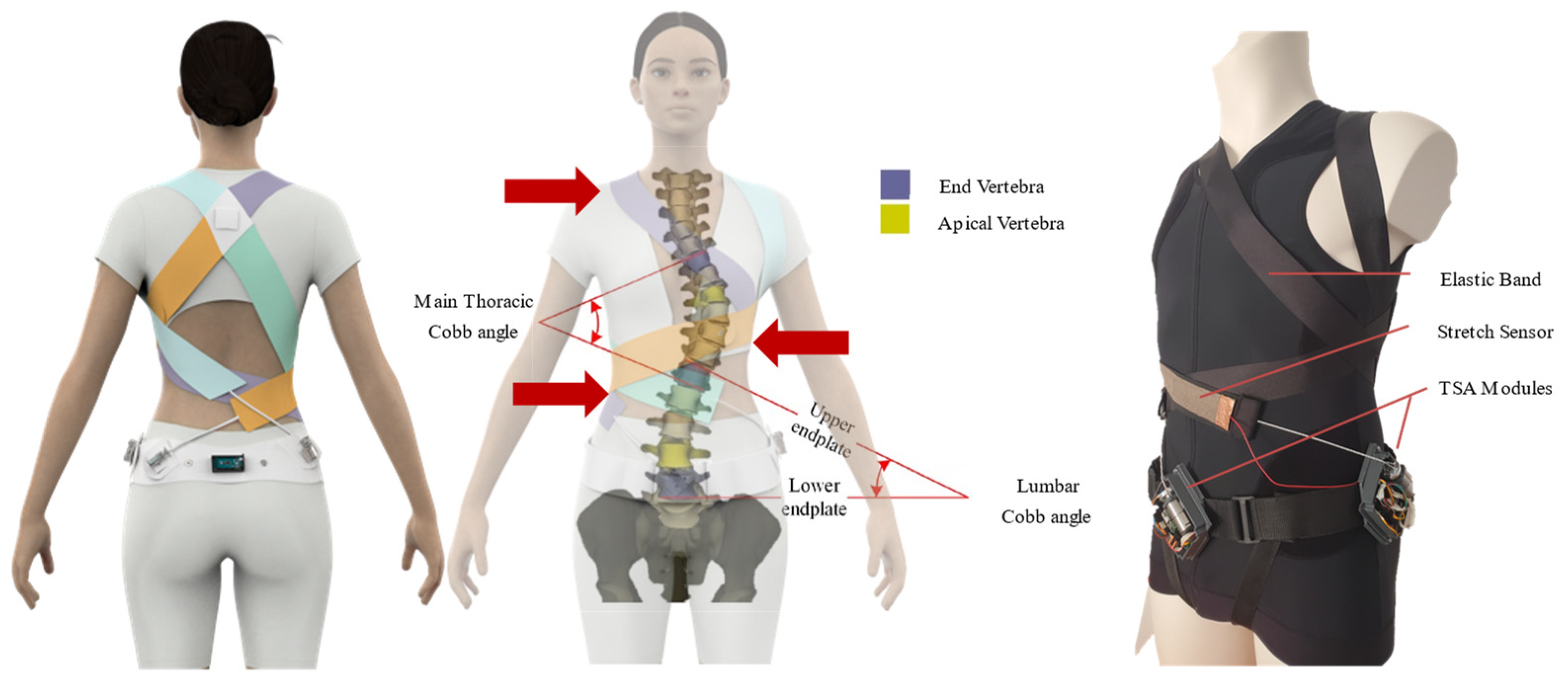
Scoliosis is a spinal disorder that is conventionally treated using rigid or soft braces. Computational methods such as finite element-based models are used to investigate the mechanics of the spine and the effect of braces. Most spinal braces are either passive, static, or rigid and do not allow mobility to the spine, resulting in muscle atrophy, skin deterioration and other spine complexities. Lack of control over the amount of force being exerted by braces on the human spine could have adverse effects. Therefore, developing an active soft brace which allows mobility to the spine while applying controlled corrective forces could be a promising solution. This study presents finite element analysis (FEA) of an active soft brace that applies corrective forces using elastic bands. The pressure exerted by the brace on the spine can be controlled by varying the tensions in the elastic bands. The elastic band tensions are controlled using low-power, lightweight, and twisted string actuators (TSAs). This study aims to demonstrate the immediate corrections induced by the soft active brace using a scoliotic spine finite element (FE) model. A FE model of the patient’s trunk was created and validated with in vitro study. The brace model was installed on the simulated trunk to evaluate in-brace correction in both sagittal and coronal planes. The brace was evaluated under various load cases by simulating the actuator action.

Robot - Wikipedia

Robotics, Free Full-Text, spyra two e1

New free robotics courses available! All lectures, notes, texts, homework, exams, and projects are freely available on our GitHub and Yo
Robotics, Free Full-Text

About - RoboticWorx
Download Free Robotics, Vision, and AI books from Springer

A compilation of robotics news article organized by subject, feel free to suggest articles. I'll add you as an editor if you request : r/robotics
Topics Framework – The International Association for Automation

Robotics Outline Icons

Robotics, Vision & Control (all versions) - Peter Corke











