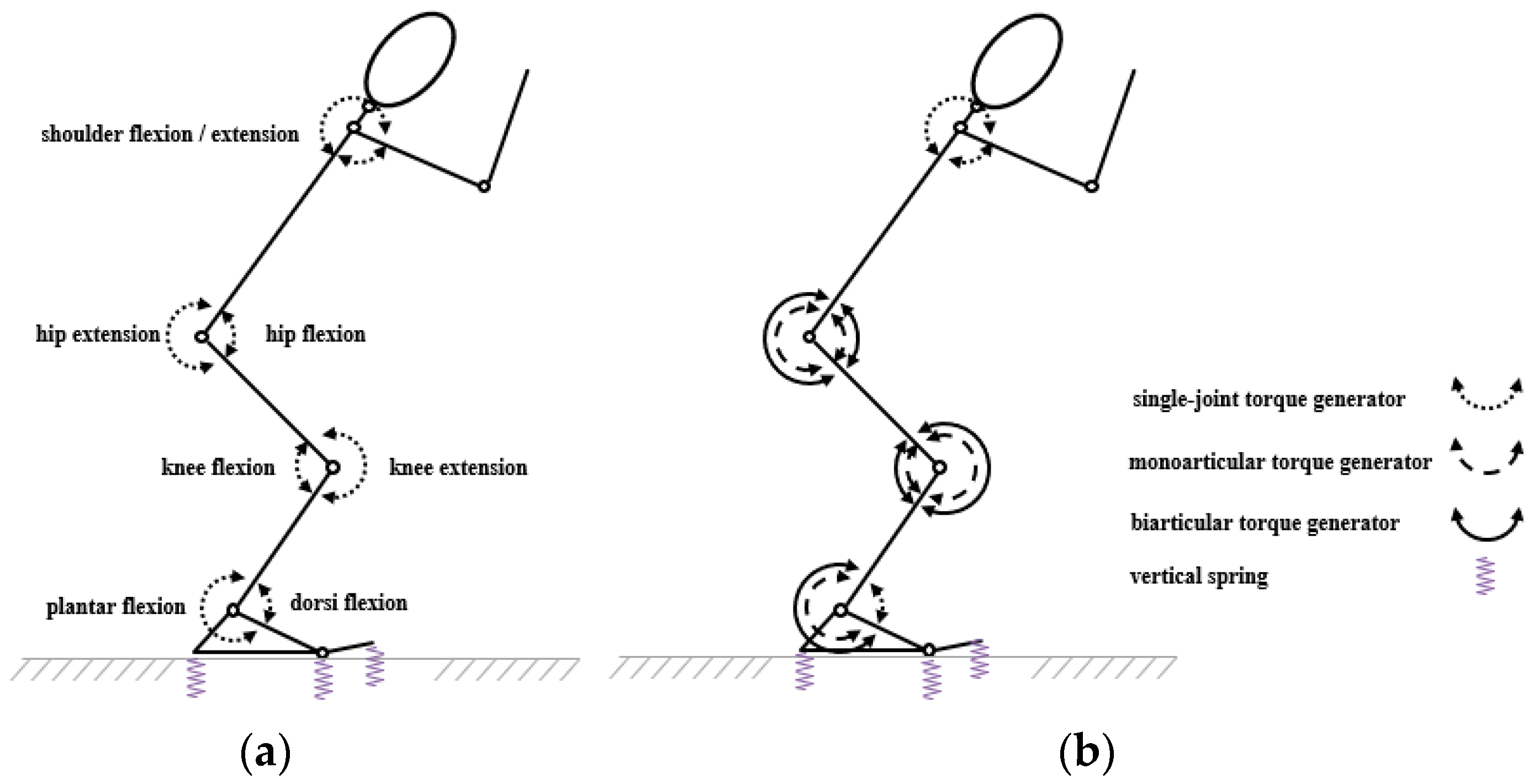
The two-segment leg has a torque-controlled actuator at the hip, and a
5 (116) · $ 9.50 · In stock


PDF] High compliant series elastic actuation for the robotic leg
Applied Sciences, Free Full-Text

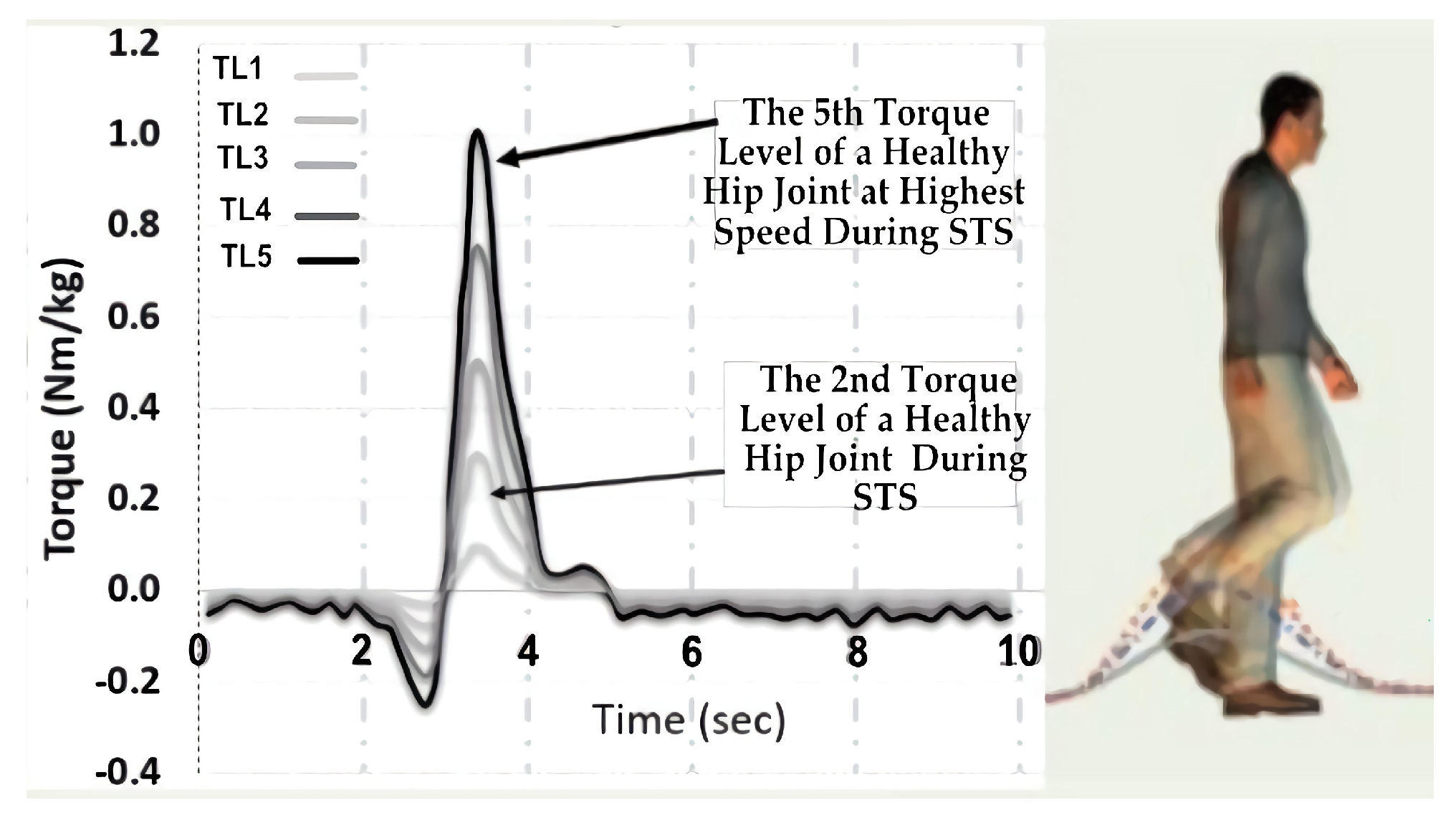
Torque control of an active elastic transfemoral prosthesis via

Robots' physical environment
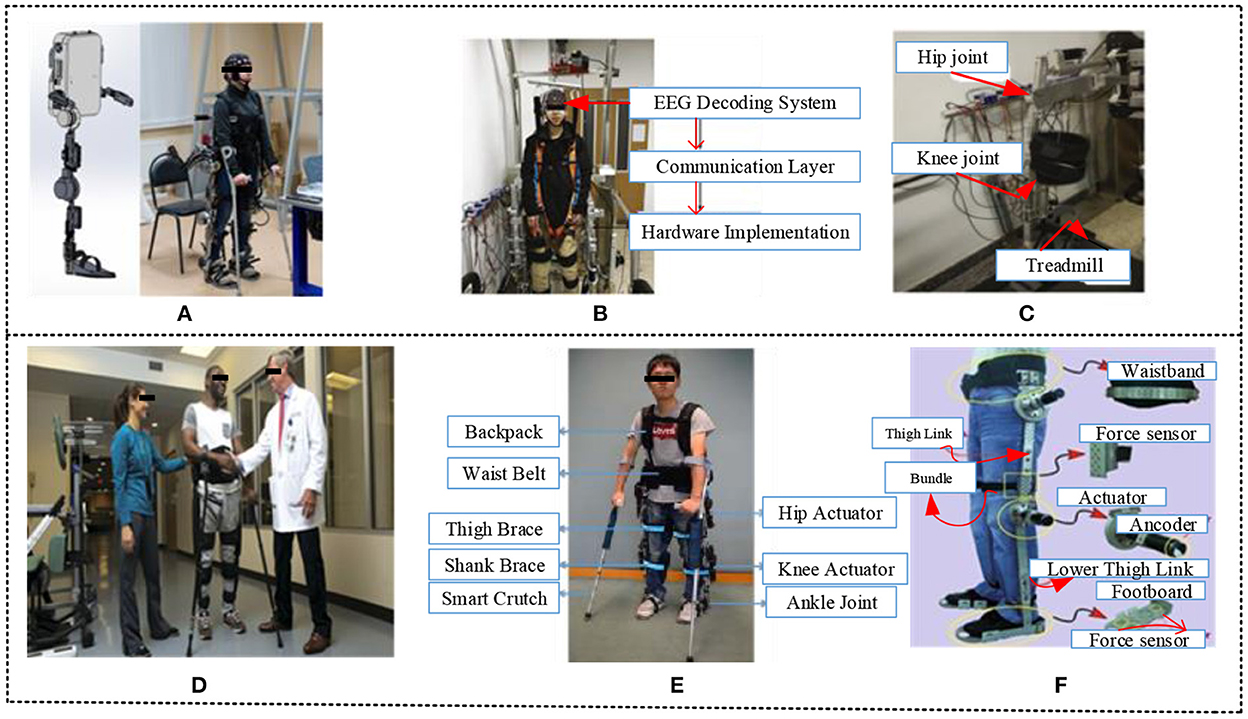
Frontiers Lower limb exoskeleton robot and its cooperative

Motor torque and power analysis. (a) Motor torque and power
The salient gradient set (SCS) for each environment is mapped out with
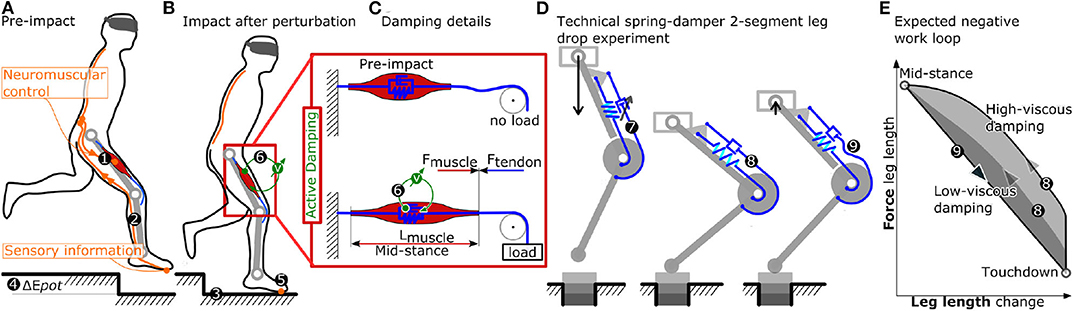
Frontiers Effective Viscous Damping Enables Morphological

Figure 1 from Optimal control simulations reveal mechanisms by

Steve Heim's research works Massachusetts Institute of Technology, MA (MIT) and other places

Sensors, Free Full-Text
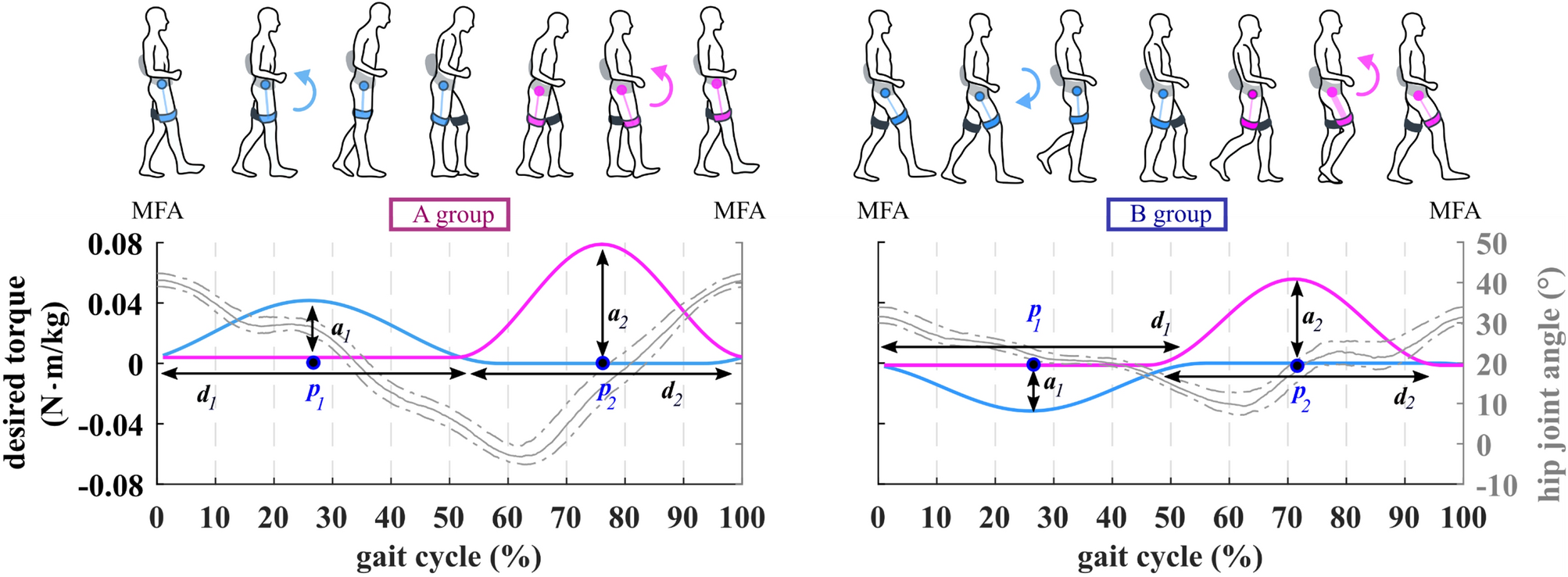
An impairment-specific hip exoskeleton assistance for gait

The two-segment leg has a torque-controlled actuator at the hip
Applied Sciences, Free Full-Text