

Percentage of area covered with 5 agents in a 100 × 100 square

juerg – InMoov

Webots documentation: Appearances
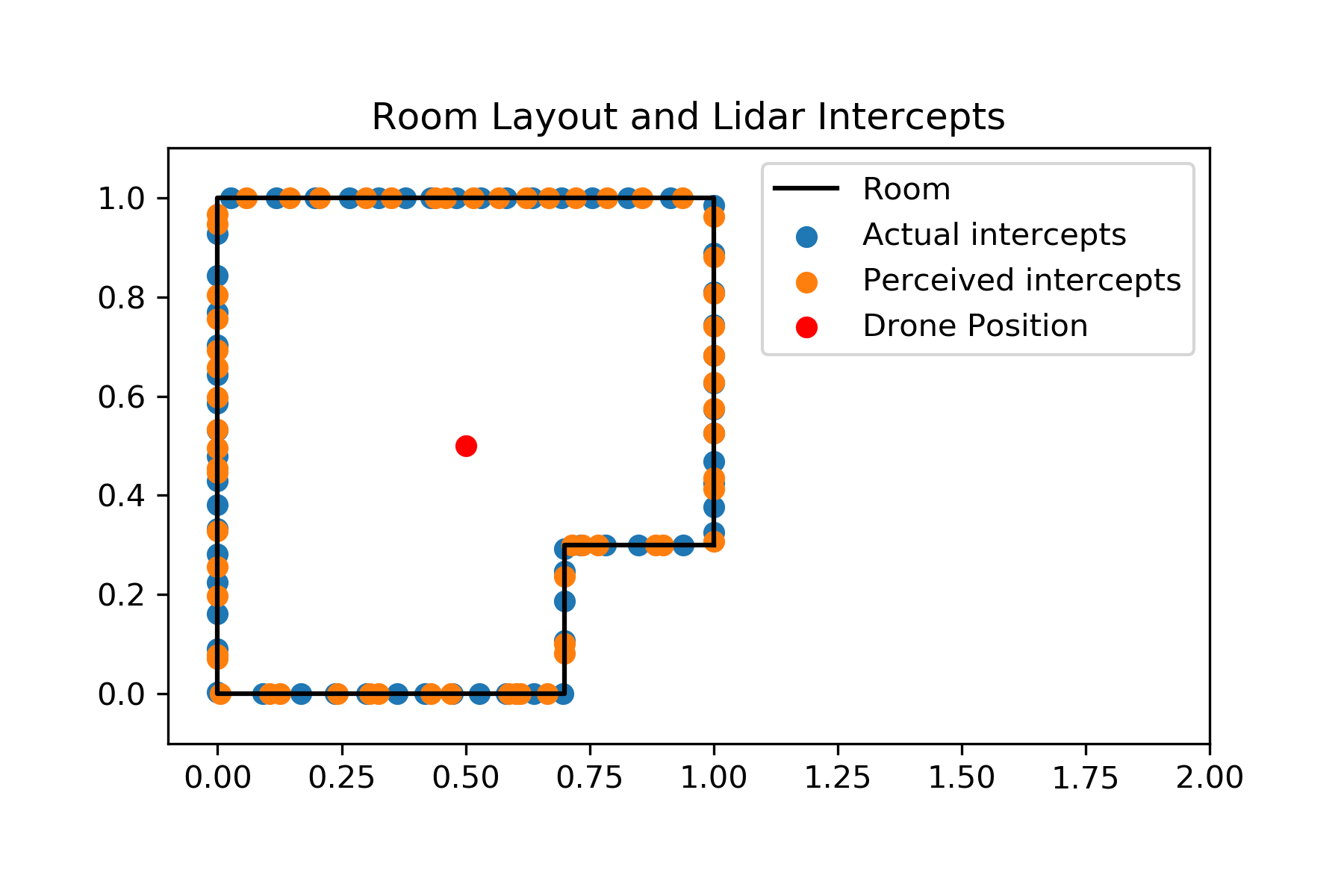
Lidar localization weekly update: Kalman filter implementation

Design of robot arm for domestic culinary assistance - ScienceDirect
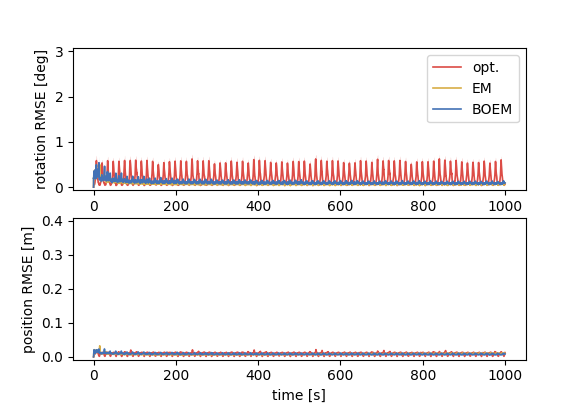
SLAM simulation with sliding window scheme
Webots documentation: Appearances
Urethane Casting Services - Treatstock

10.1007@978 3 030 63665 4, PDF, Computer Network
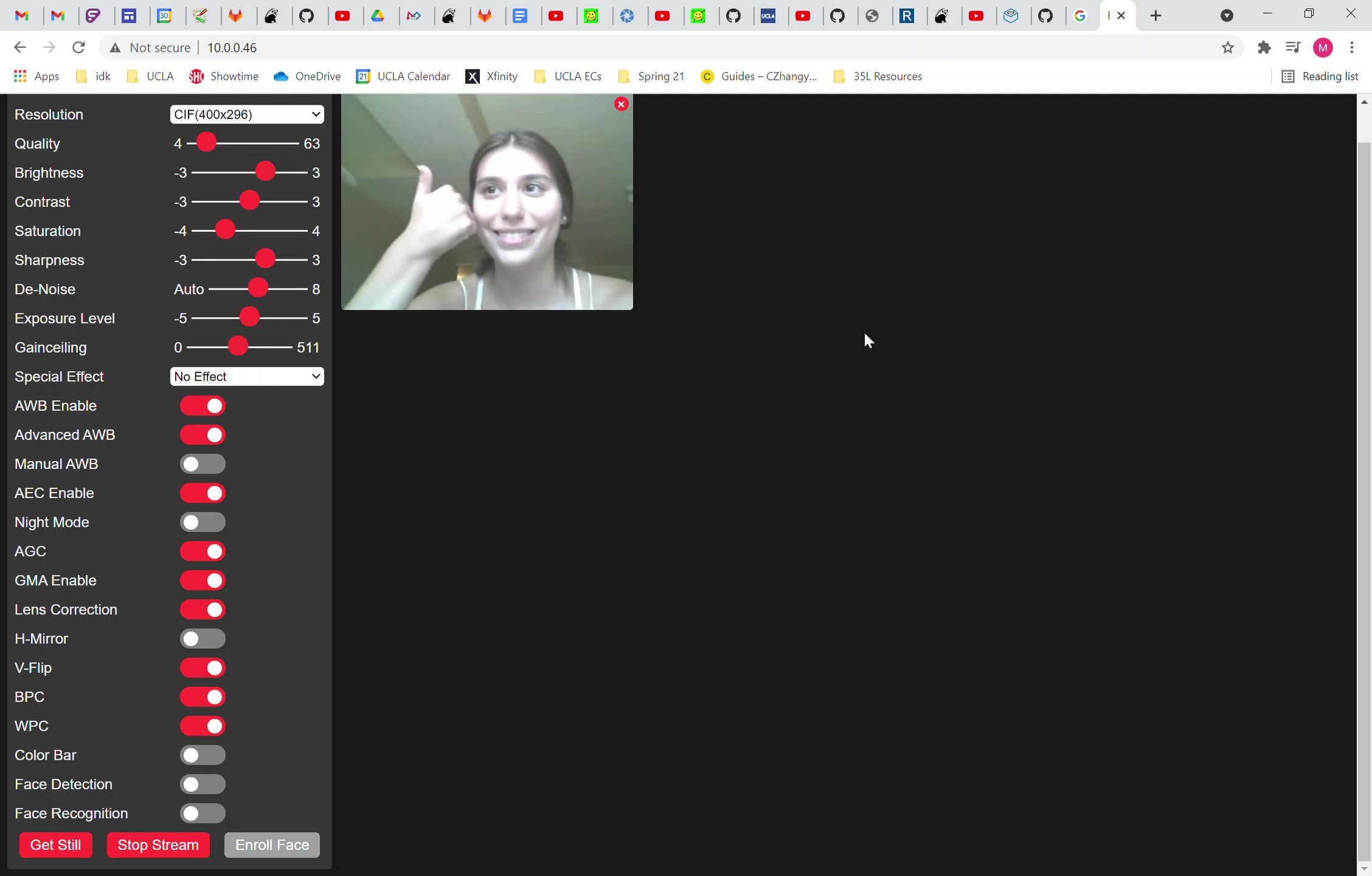
Camera Setup for Visual Processing

Urethane Casting Services - Treatstock

Function Block Diagram for Autonomous Blimp
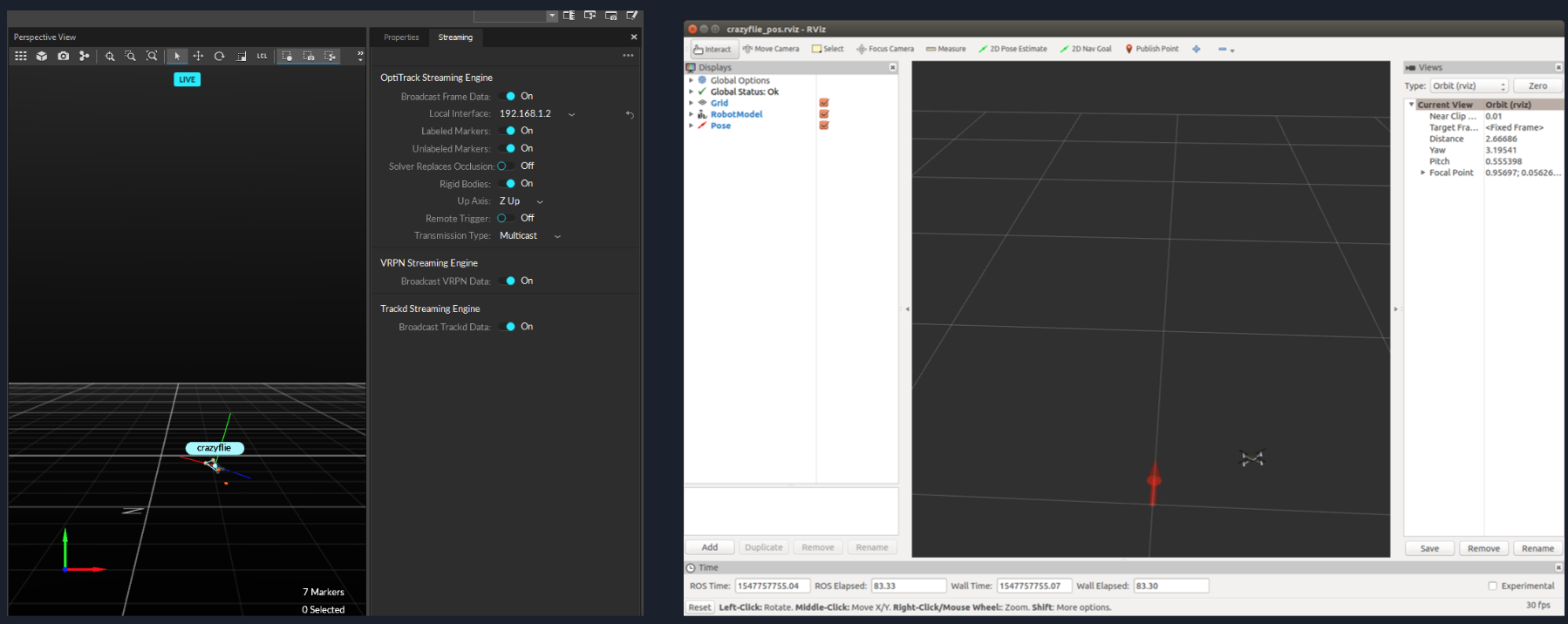
Hovering Crazyflie Autonomously using ROS+Optitrack
You may also like












© 2018-2024, bellvei.cat, Inc. or its affiliates